TwinCAT
This project uses a PLC visual to run the motor in a number of modes using the standard axis and motion libraries. It is configured to run from a C6017 PLC. This can be changed in the project to a different PLC or local device. The project is archived as .tnzip and can be imported through File → Open → Open Solution from archive
Trio Motion Technology
Trio Motion Technology have a series of EtherCAT master controllers. The following example use the MC4N-ECAT to control the CM1-E.
The CM1-E utilizes the EC_EXTEND.txt file to add the CM1-E as a slave device. The sample EC_EXTEND can be found in the example project (CM1-E Motion Perfect Example .zip).
 CM1-E Motion Perfect Example .zip
CM1-E Motion Perfect Example .zip
Motion Perfect Sample
The project sample includes the EC_EXTEND, a move program and a reset from error program.
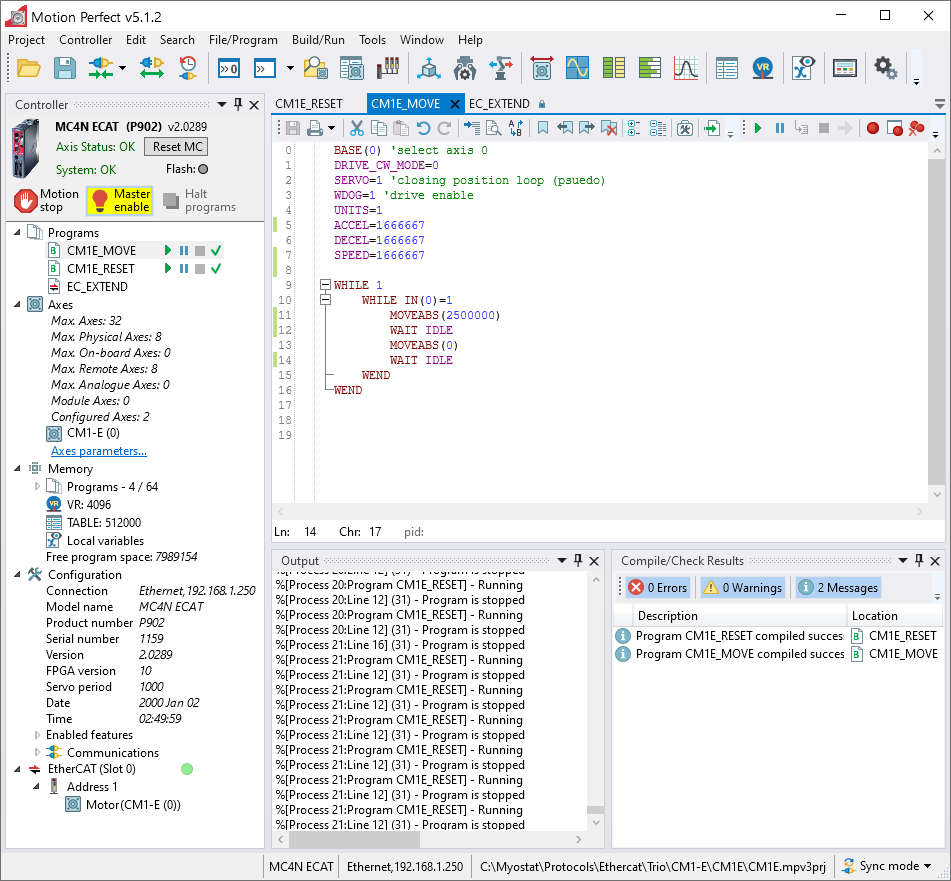
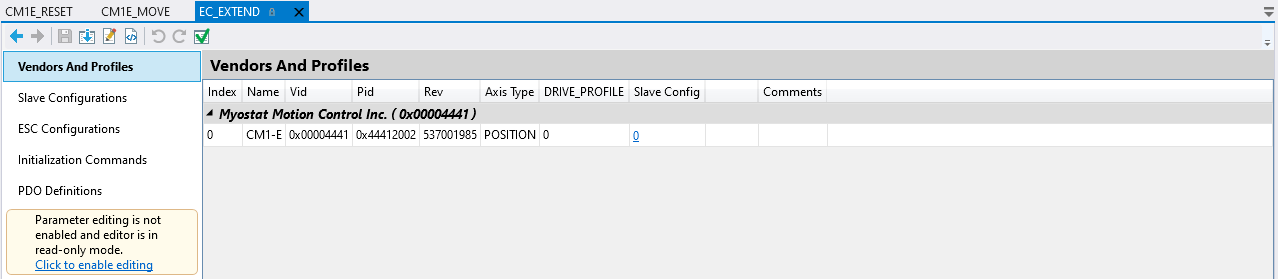
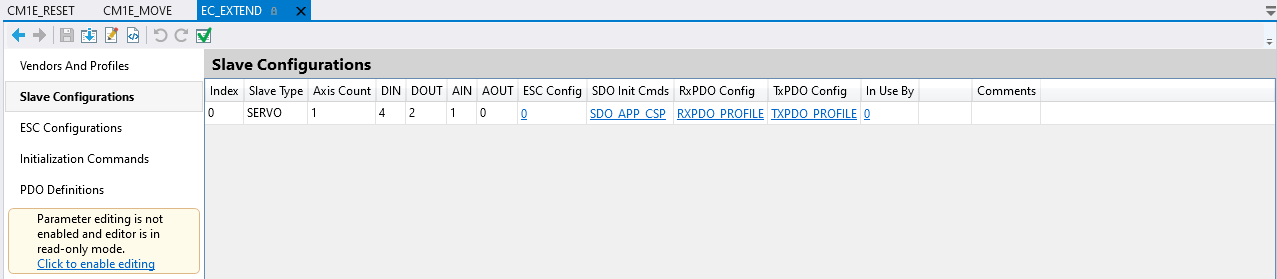
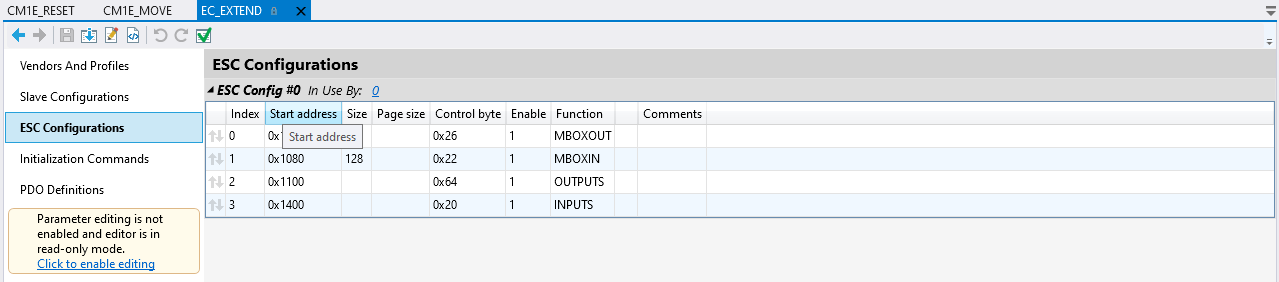
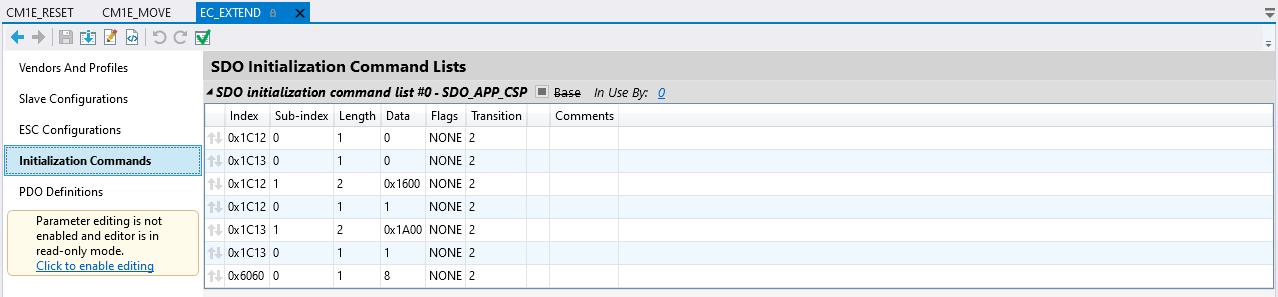
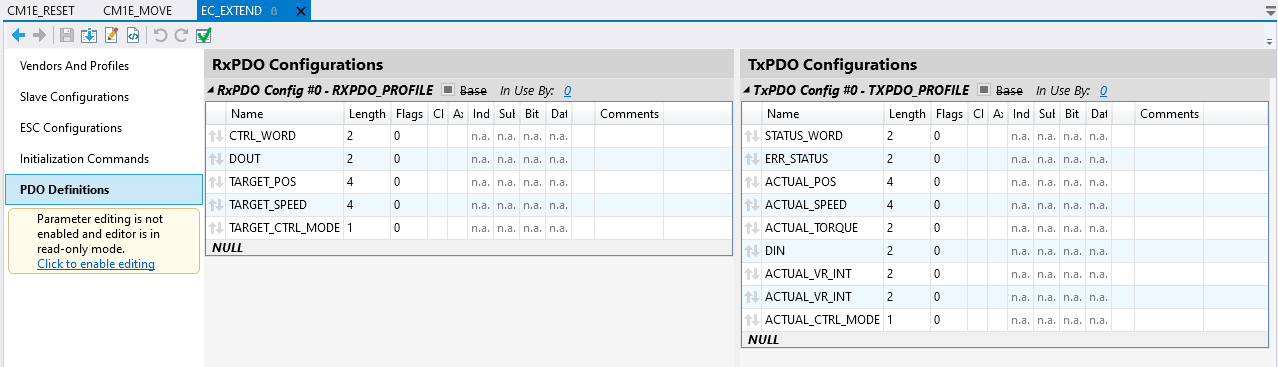
EC_EXTEND
The EC_EXTEND.txt can be used or can be setup as per the following images. The easiest method for is to import the CM1-E xml and then do a few small modifications to the PDO Definitions to match the images below.
The xml can be found here Myostat_CM1-E (V1.3.0).xml
Overview
Content Tools