Overview
EtherCAT®(1) is a high speed, real time communication protocol that has the ability to update many devices in the microsecond range. This makes it ideal for multi-axis synchronised control or in systems where a master is coordinating a large variety of devices such as sensors, motion axes, distributed IO, etc.
The following network diagram shows a typical EtherCAT network including an EtherCAT master, 3 Cool Muscle slave devices and an additional IO module.
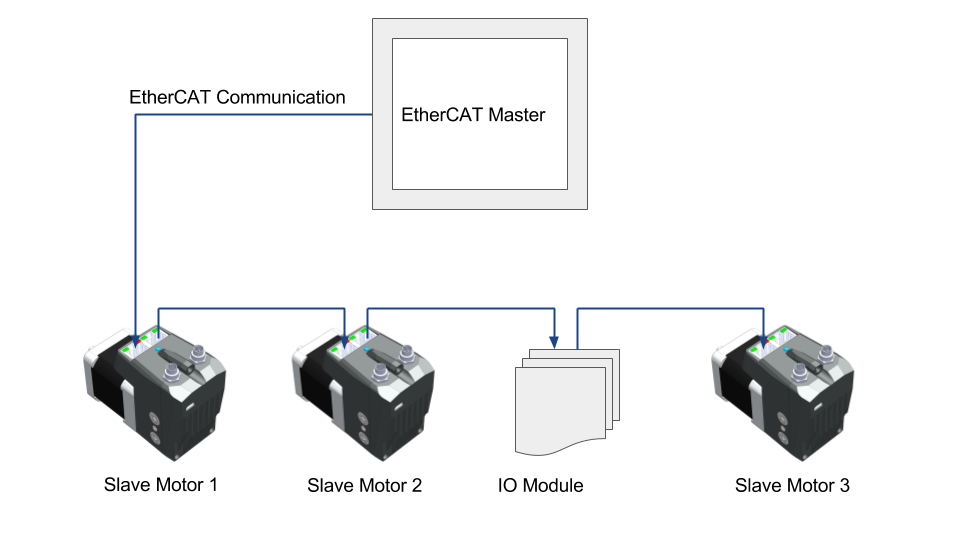
Figure: EtherCAT Network Topology
Cool Muscle Motors
The following CM1 motors are available with integrated EtherCAT communication. Use the Cool Muscle EtherCAT Bridge for all other models
| Part Number | Torque | Max Speed |
|---|---|---|
| CM1-E-17S30C | 0.117 Nm (11.61 oz.in) | 3000 rpm |
| CM1-E-17L30C | 0.54 Nm (76.4 oz.in) | 3000 rpm |
| CM1-E-23S30C | 0.46 Nm (65.14 oz.in) | 3000 rpm |
| CM1-E-23L20C | 1.24 Nm (175.6 oz.in) | 2000 rpm |
Table: Integrated EtherCAT Cool Muscle motors
(1) EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany.
Overview
Content Tools