Description
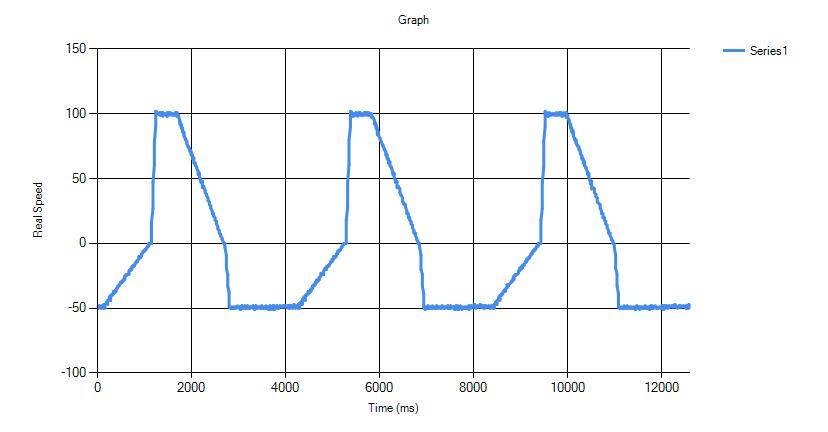
The required move needs a different acceleration and deceleration. By design the Cool Muscle uses a single acceleration value (a#) for both acceleration and deceleration. The following graph shows motor speed as it repeatedly moves between position A and position B. The positive speed is the motor moving from A to B and the negative speed is the motor moving back from B to A. Both moves show a different acceleration and deceleration.

The required move is achieved using the merge motion command structure.
Merge Motion
Merge motion allows you to merge multiple position points together.
In this case we will have a position halfway between the start position and the end position. The motor will first move
to this point with the defined acceleration. It will then merge into the end point with the acceleration changed to the
required deceleration value.
e.g.
A1,S1,P3,A2,P1 --> with A1 and S1 move to P3, then switch to A2 and stop at P1.
Caution should be taken that the move is theoretically possible. I.e. the motor can decelerate to the
final target position with the desired distance and deceleration value.
Program
//Move 1 parameters a1=100 //acceleration value a2=10 //deceleration value s1=100 //target speed p1=10000 //final position //Move 2 parameters a3=50 //acceleration value a4=5 //deceleration value s2=50 //target speed p2=0 //final position p3=5000 //midpoint position used by both moves //Example bank B1 X0 A1,S1,P3,A2,P1 //move 1 A3,S2,P3,A4,P2 //move 2 X- END.1
Attachments
{kind=link}
Overview
Content Tools