
Introduction
Overview
EtherCAT®(1) is a high speed, real time communication protocol that has the ability to update many devices in the microsecond range. This makes it ideal for multi-axis synchronised control or in systems where a master is coordinating a large variety of devices such as sensors, motion axes, distributed IO, etc.
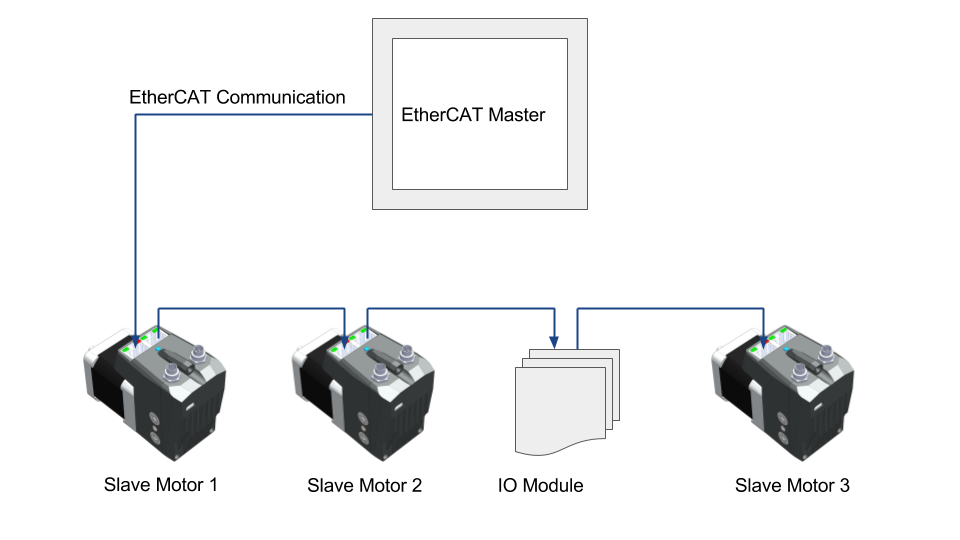
The following network diagram shows a typical EtherCAT network including an EtherCAT master, 3 Cool Muscle slave devices and an additional IO module.
Cool Muscle Motors
The following CM1 motors are available with integrated EtherCAT communication. Use the Cool Muscle EtherCAT Bridge for all other models
Part Number | Input Voltage | Peak Torque | Peak Current | Peak Speed |
|---|---|---|---|---|
24V ± 10% | 0.117 Nm (11.61 oz.in) | 1.0A | 3000 rpm | |
24V ± 10% | 0.54 Nm (76.4 oz.in) | 1.8A | 3000 rpm | |
24V ± 10% | 0.46 Nm (65.14 oz.in) | 5.1A | 3000 rpm | |
24V ± 10% | 1.24 Nm (175.6 oz.in) | 3.4A | 2000 rpm |
If the drive and control power are separated all motors will draw a maximum of 125mA on the 24V control power.
(1) EtherCAT® is registered trademark and patented technology, licensed by Beckhoff Automation GmbH, Germany.