This manual covers all Ethernet functionality of the CM1-T. For CML programming see the CM1-C User Guide. |
The CM1-T is an Ethernet based Cool Muscle. It offers all the functionality of the standard Cool Muscle but enables connections over TCP/IP, UDP, Modbus-TCP and EtherNet/IP. This variant of the Cool Muscle cannot be daisy chained.
The following terminology is important to understand how to understand this document and how to operate the motor.
| Term | Description |
|---|---|
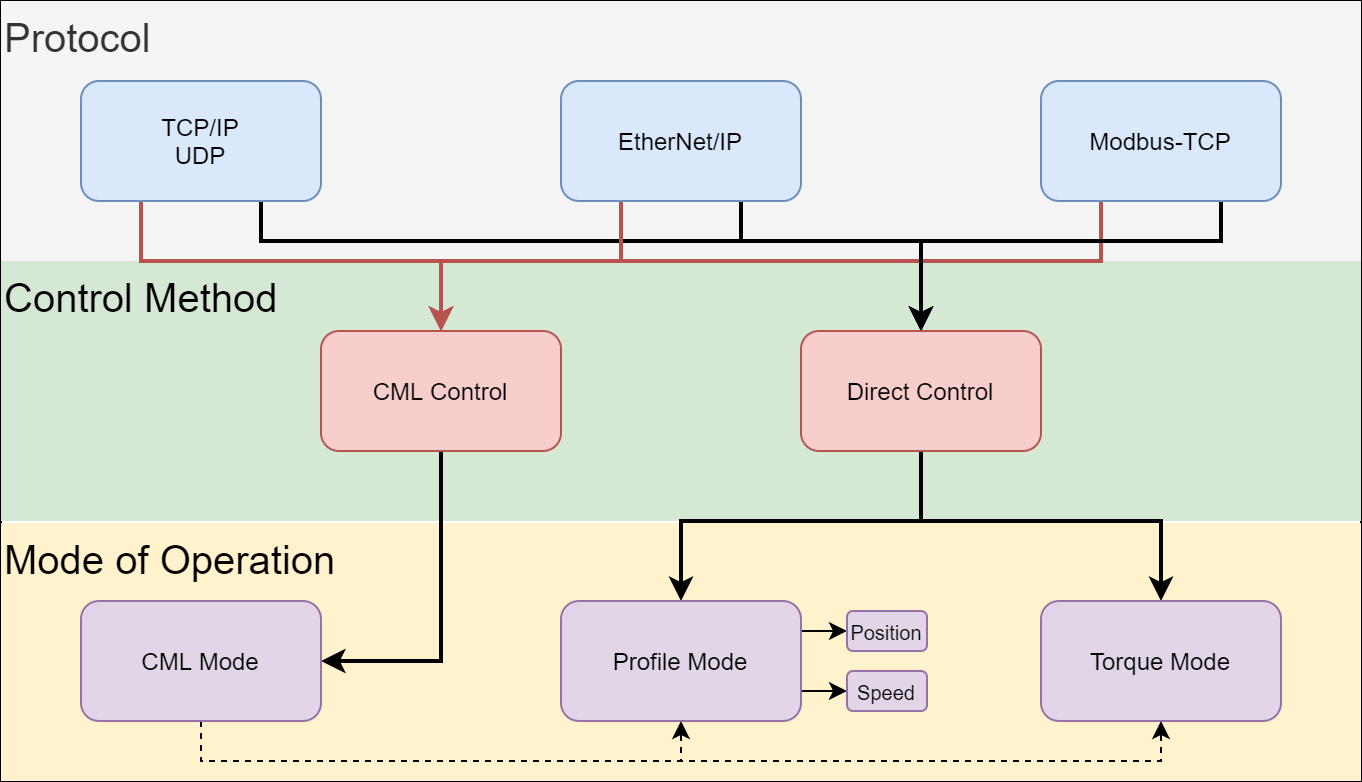
| Protocols | The protocols are the different Ethernet languages the user can implement to communicate to the controls methods. They are
|
| Control method | The control method indicates how the motor controller is communicated with, updated and controlled. Control methods are
|
| Mode of operation | The mode of operation is how the motor controller operates in Direct Control. This is how the motor's motion controller generates a set of outputs to the motor driver. These are typically
|
| TCP/UDP | This refers to any port or protocol that can be connected using TCP/IP and/or UDP. |
The following diagram shows how the protocols break down to the different modes of operation
Any TCP/IP enabled client device can connect and communicate with the CM1-T. The table below lists the ports and protocols they are associated with
| Protocol | Port # | # TCP | # UDP | Description |
|---|---|---|---|---|
| CML | 10001 | 1 | 1 | Protocol used by the standard motor. Program the motor to run from IO, etc. |
| Direct Control Port | 10002 | 1 | 1 | Directly control the motor in a number of modes such as position, speed and torque |
| Modbus-TCP | 502 | 1 | 0 | Modbus access to all motor registers including CML and Direct Control. |
| Motor Information Port | 30718 | 0 | 1 |
|
| EtherNet/IP | 44818 2222 | 2 0 | 1 | EtherNet/IP CIP EtherNet/IP IO |
Additional connection information can be found in Network Configuration.
Refer to the CM1-C User Guide for details on using CML. You will find information on the following in this manual:
As stated in the introduction the CM1-T is a standalone motor and cannot be used in a daisy-chain configuration. As such there are features in CML related to multiple motor networks which will not function if programmed.
Features that cannot be used in the CM1-T:
Modbus-TCP reads and writes to all motor registers.
See the EtherNet/IP section of this document for details on using the CM1-T with EtherNet/IP
Control Room is the Cool Muscle Windows application to program the motors. It is typically not used for run-time operation but this can depend on the user's requirements. Control Room can open up a connection in either standard CML mode or by Modbus-TCP. Two instances of Control Room can be opened if the user needs to use Modbus-TCP and CML simultaneously.
Note: You cannot program in CML mode if the connection is opened in Modbus Mode and you cannot use the Modbus Window if the connection is opened not in Modbus Mode.
To connect to a motor use the TCP/IP options, Connect to IP and Enable Modbus Mode functions on the Connection tab as shown below.
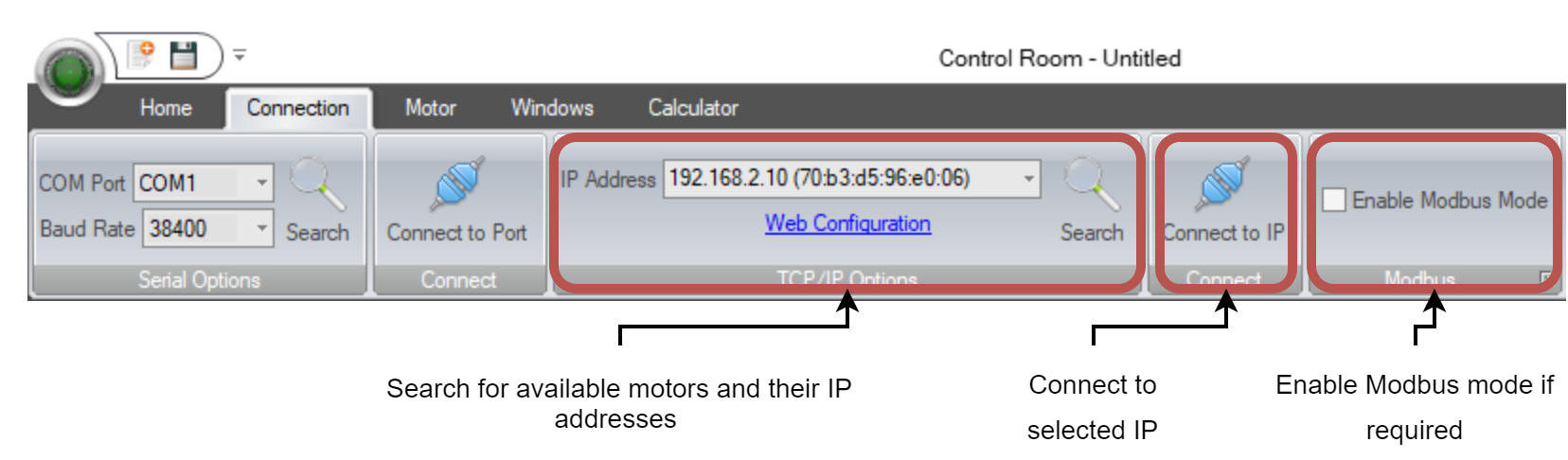
Search Button
Connect to IP Button
Enable Modbus Mode Checkbox
Note: The Web Configuration is not available on the CM1-T. Use the Network Configuration Tool to setup network related parameters.