Table of Contents
Provides information on the device type.
Sub-index | Description | Range | Default | Type | Access | PDO Mapping |
|---|---|---|---|---|---|---|
| 0x00 | Device Type | 0x00-0xFFFFFFFFh | 0x00040192 | UDINT | ro | No |
Explanation of set value
Bits | Name | Description |
|---|---|---|
| 0-15 | Device Profile Number | 402 (0x192): Drive Profile |
| 16-23 | Type | 04: Step motor |
| 24-31 | Mode | 0: Manufacturer specific |
Indicates the error type that occurs in the slave device. The generic error bit is set on all errors. Specific error codes can be found in object Object Dictionary#0x603F
Sub-index | Description | Range | Default | Type | Access | PDO Mapping |
|---|---|---|---|---|---|---|
| 0x00 | Error Register | 0x00-0xFF | 0x00 | USINT | ro | No |
Definition of bits:
Bit | Error Description |
|---|---|
| 0 | Generic |
| 1 | Current |
| 2 | Voltage |
| 3 | Temperature |
| 4 | Communication Error |
| 5 | Device profile specific |
| 6 | N/A |
| 7 | Manufacturer specific |
Indicates the manufacturers device name
Sub-index | Description | Range | Default | Type | Access | PDO Mapping |
|---|---|---|---|---|---|---|
| 0x00 | Manufacturers Device Name | - | "CM1-E" | STRING | ro | No |
Indicates the EtherCAT hardware version.
Sub-index | Description | Range | Default | Type | Access | PDO Mapping |
|---|---|---|---|---|---|---|
| 0x00 | Manufacturer Hardware Version | - | "MYO28-02A" | STRING | ro | No |
Indicates the version of the EtherCAT firmware
Sub-index | Description | Range | Default | Type | Access | PDO Mapping |
|---|---|---|---|---|---|---|
| 0x00 | Manufacturer Software Version | - | "1.0.0" | STRING | ro | No |
Indicates general device information
Sub-index | Description | Range | Default | Type | Access | PDO Mapping |
|---|---|---|---|---|---|---|
| 0x00 | Number of Entries | 0x01-0x04 | 0x04 | USINT | ro | No |
| 0x01 | Vendor ID | 0x00-0xFFFFFFFF | 0x00004441 | UDINT | ro | No |
| 0x02 | Product Code | 0x00-0xFFFFFFFF | 0x44412002 | UDINT | ro | No |
| 0x03 | Revision Number | 0x00-0xFFFFFFFF | 0x20020001 | UDINT | ro | No |
| 0x04 | Serial Number | 0x00-0xFFFFFFFF | 0x00000000 | UDINT | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x07 | ro | No |
0x01 | Controlword mapping | 0x60400010 | ro | No |
| 0x02 | Target position mapping | 0x607A0020 | ro | No |
| 0x03 | Target velocity mapping | 0x60FF0020 | ro | No |
| 0x04 | Digital outputs mapping | 0x60FE0010 | ro | No |
| 0x05 | Mode of operation mapping | 0x60600008 | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x04 | ro | No |
| 0x01 | Controlword mapping | 0x60400010 | ro | No |
| 0x02 | Target position mapping | 0x607A0020 | ro | No |
| 0x03 | Digital outputs mapping | 0x60FE0010 | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x04 | ro | No |
| 0x01 | Controlword mapping | 0x60400010 | ro | No |
| 0x02 | Target velocity mapping | 0x60FF0020 | ro | No |
| 0x03 | Digital outputs mapping | 0x60FE0010 | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x06 | ro | No |
| 0x01 | Controlword mapping | 0x60400010 | ro | No |
| 0x03 | Target Position mapping | 0x607A0020 | ro | No |
| 0x04 | Target Velocity mapping | 0x60FF0020 | ro | No |
| 0x05 | Profile Velocity mapping | 0x60810020 | ro | No |
| 0x06 | Profile Acceleration mapping | 0x60830020 | ro | No |
| 0x07 | Mode of operation mapping | 0x60600008 | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x0B | ro | No |
| 0x01 | Statusword mapping | 0x60410010 | ro | No |
| 0x02 | Position actual value mapping | 0x60640020 | ro | No |
| 0x03 | Velocity actual value mapping | 0x606C0020 | ro | No |
| 0x04 | Torque actual value mapping | 0x60770020 | ro | No |
| 0x05 | Digital input mapping | 0x60FD0010 | ro | No |
| 0x06 | Error code mapping | 0x603F0010 | ro | No |
| 0x07 | Temperature-C mapping | 0x23010010 | ro | No |
| 0x08 | DC voltage mapping | 0x60790010 | ro | No |
| 0x09 | Modes of operation display mapping | 0x60610008 | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x07 | ro | No |
| 0x01 | Statusword mapping | 0x60410010 | ro | No |
| 0x02 | Position actual value mapping | 0x60640020 | ro | No |
| 0x03 | Velocity actual value mapping | 0x606C0020 | ro | No |
| 0x04 | Torque actual value mapping | 0x60770020 | ro | No |
| 0x05 | Digital input mapping | 0x60FD0010 | ro | No |
| 0x06 | Error code mapping | 0x603F0010 | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x07 | ro | No |
| 0x01 | Statusword mapping | 0x60410010 | ro | No |
| 0x02 | Position actual value mapping | 0x60640020 | ro | No |
| 0x03 | Velocity actual value mapping | 0x606C0020 | ro | No |
| 0x04 | Torque actual value mapping | 0x60770020 | ro | No |
| 0x05 | Digital input mapping | 0x60FD0010 | ro | No |
| 0x06 | Error code mapping | 0x603F0010 | ro | No |
Sub-index | Description | Value | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | 0x0B | ro | No |
| 0x01 | Statusword mapping | 0x60410010 | ro | No |
| 0x02 | Position actual value mapping | 0x60640020 | ro | No |
| 0x03 | Velocity actual value mapping | 0x606C0020 | ro | No |
| 0x04 | Torque actual value mapping | 0x60770020 | ro | No |
| 0x05 | Digital input mapping | 0x60FD0010 | ro | No |
| 0x06 | Error code mapping | 0x603F0010 | ro | No |
| 0x07 | Temperature-C mapping | 0x23010010 | ro | No |
| 0x08 | DC voltage mapping | 0x60790010 | ro | No |
| 0x09 | Mode of operation display mapping | 0x60610008 | ro | No |
Indicates specific error code when an error occurs.
Sub-index | Description | Range | Default | Type | Access | PDO Mapping |
|---|---|---|---|---|---|---|
| 0x00 | Error Code | 0x0000-0xFFFF | 0x0000 | UINT | ro | No |
The following table outlines the error and the relevant objects that are set.
0x603F Error Code | 0x1001 Error Register | 0x6041 Fault (Bit 3) | Description |
|---|---|---|---|
| 0x0000 | 0x00 | 0 | No error |
| 0x2310 | 0x03 | 1 | Continuous over current error (torque overload) |
| 0x4310 | 0x09 | 1 | Drive over temperature |
| 0x4502 | 0x00 | 0 | No mode selected (0x6060=0) 1 |
| 0x7310 | 0x81 | 1 | Over speed error |
| 0x7320 | 0x81 | 1 | Position Error overflow |
| 0x7500 | 0x11 | 1 | Motor communication error |
| 0x7510 | 0x11 | 1 | Motor drive to EtherCAT slave communication error |
| 0x8611 | 0x00 | 0 | Motor not currently following commanded position 1,2 |
| 0xFF01 | 0x00 | 0 | Motor disabled by command1 |
| 0xFF04 | 0x81 | 1 | Emergency stop active |
| 0xFF05 | 0x11 | 0/13 | 24V drive power not present |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Used to control the drive's state machine | UINT | rw | Yes |
For more information on the Controlword usage see the chapter CiA 402 - Drives and Motion Control Device Profile
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Displays the status of the drive's state machine | UINT | ro | Yes |
For more information on the Statusword usage see the chapter CiA 402 - Drives and Motion Control Device Profile
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the desired mode of operation | SINT | rw | Yes |
| Value | Mode of Operation |
|---|---|
| 0 | No mode selected |
| 3 | Profile Velocity (PV) Mode |
| 6 | Homing Mode (HM) |
| 8 | Cyclic Synchronois Position (CSP) Mode |
| 9 | Cyclic Synchronous Velocity (CSV) Mode |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the mode of operation currently set on the drive | SINT | ro | Yes |
| Value | Mode of Operation |
|---|---|
| 0 | No mode selected |
| 3 | Profile Velocity (PV) Mode |
| 8 | Cyclic Synchronois Position (CSP) Mode |
| 9 | Cyclic Synchronous Velocity (CSV) Mode |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the actual position of the motor.
(50,000 pulses/revolution) | DINT | ro | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the actual speed of the motor.
(50,000 pulses/revolution) | DINT | ro | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the peak torque of the motor.
| UINT | ro | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the max current of the motor.
| UINT | ro | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the rated current of the motor.
| UDINT | ro | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the rated torque of the motor.
| UDINT | ro | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the actual torque of the motor.
| INT | ro | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the actual value of the 24V DC bus.
| DINT | ro | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the target position of the motor.
| DINT | rw | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the offset after a home switch/hardstop has been found.
| DINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the target velocity in profile position mode
| UDINT | rw | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the profile acceleration.
| UDINT | rw | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the profile deceleration in profile velocity mode.
| UDINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the method of the home routine.
| SINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Highest sub-index supported | SINT | rw | No |
| 0x01 | Speed during search for switch or hardstop
| UDINT | rw | No |
| 0x02 | N/A Speed during search for 0 uses the same speed as search for switch/hardstop | UDINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the homing acceleration in homing mode.
| UDINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Highest sub-index supported = 0x51 (81d) | USINT | rw | No |
0x51 ... 0x51 | K parameter settings.
| UINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | UINT | ro | No |
| 0x01 | H0 | INT | rw | No |
| 0x02 | H1 | INT | rw | No |
| 0x03 | H2 | INT | rw | No |
| 0x04 | H3 | INT | rw | No |
| 0x05 | H4 | INT | rw | No |
| 0x06 | H5 | INT | rw | No |
| 0x07 | H6 | INT | rw | No |
| 0x08 | H7 | INT | rw | No |
| 0x09 | H8 | INT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the status of the inputs | UINT | ro | Yes |
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| INPUT | - | - | - | - | 4 | 3 | 2 | 1 |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the digital output | UINT | rw | Yes |
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| OUTPUT | - | - | - | - | - | - | OUT2 | OUT1 |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the target velocity of the motor.
| DINT | rw | Yes |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Shows support drive modes Value = 0x1A5 Bit0 = 1: PP mode | UDINT | ro | No |
This object contains 4 volatile variables. Variable1 in addition has BIT15 and BIT14 mapped to the manufacturer specific bits, B15 and B14, on the Statusword (0x6041).
An example of usage would be if the application requires a custom home routine. These bit could be set as a flag to indicate the home routine has been completed. Due to the volatile nature of the variables if a reset occurs on the drive the flag bit would be reset.
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | UINT | ro | No |
| 0x01 | Variable1 | DINT | rw | BIT15 and B14 are mapped to the Statusword 0x6041 BIT15 and B14. |
| 0x02 | Variable2 | DINT | rw | No |
| 0x03 | Variable3 | DINT | rw | No |
| 0x04 | Variable4 | DINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Read the drive temperature
| INT | ro | Yes |
The PDO time is autodetected by the slave. The detected time can be read in 0xFE00.
Only PDO rates of 200μs, 250μs, 500μs and 1000μs (1ms) are accepted by the CM1-E.
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Number of entries | UINT | ro | No |
| 0x01 | PDO Time in μs | UINT | ro | No |
| 0x02 | N/A | UINT | ro | No |
| 0x03 | N/A | UINT | ro | No |
| 0x04 | N/A | UINT | ro | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Set the brightness of the system and motor status LED.This is a non-volatile object that is stored in memory.
| SINT | rw | No |
Sub-index | Description | Type | Access | PDO Mapping |
|---|---|---|---|---|
| 0x00 | Override the status LED colour and flash. This allows the user to use the status LED to indicate custom operations such as identify a motor in a large axes application. | UDINT | rw | No |
Byte Description
| Byte3 | Byte2 | Byte1 | Byte0 | |
|---|---|---|---|---|
| Description | Red LED on/off | Green LED on/off | Blue LED on/off | Override on/off Bit 0 - override on/off |
| Values | 0x00 - Red OFF | 0x00 - Green OFF | 0x00 - Blue OFF | 0x00 - No override |
Example Values
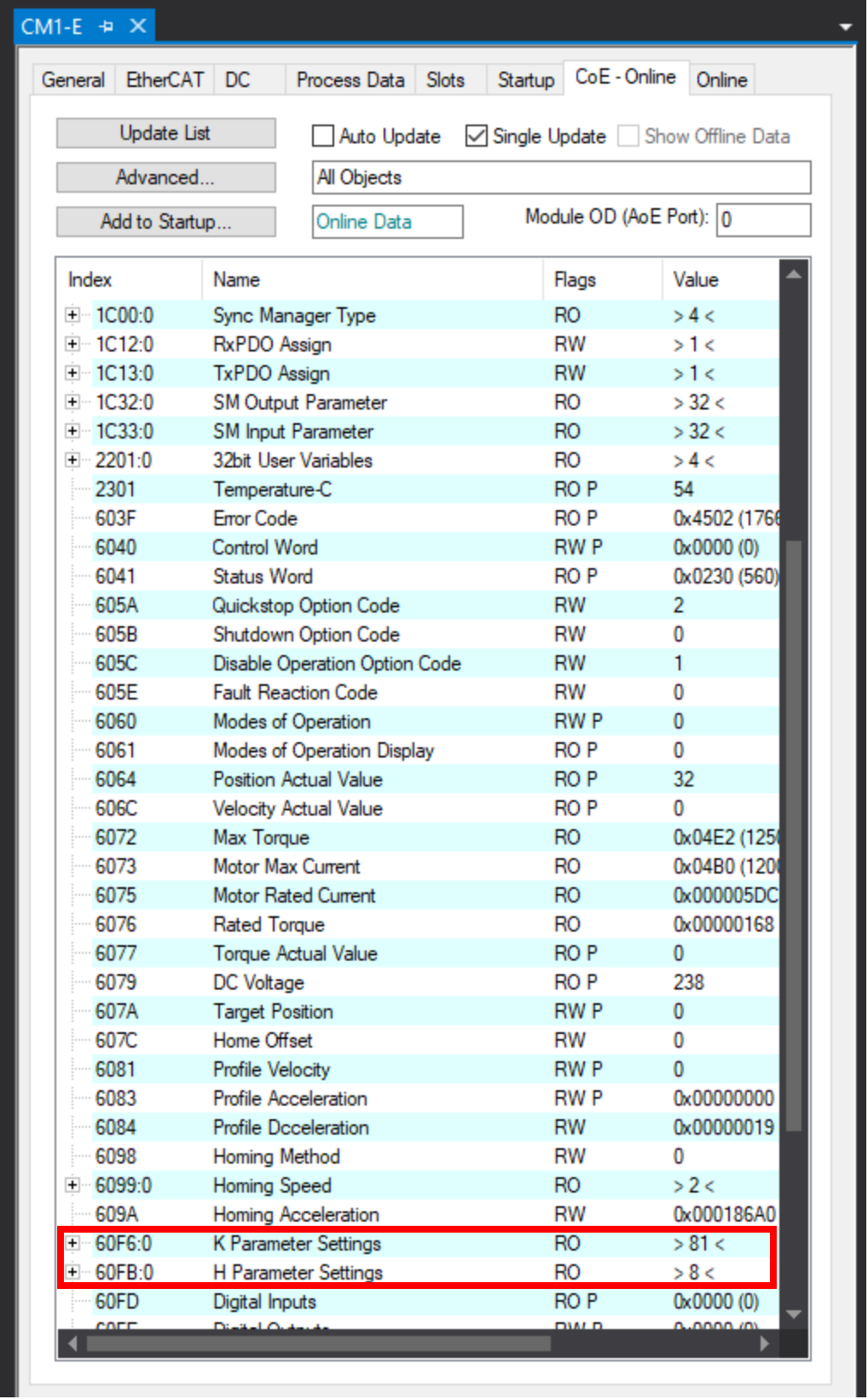
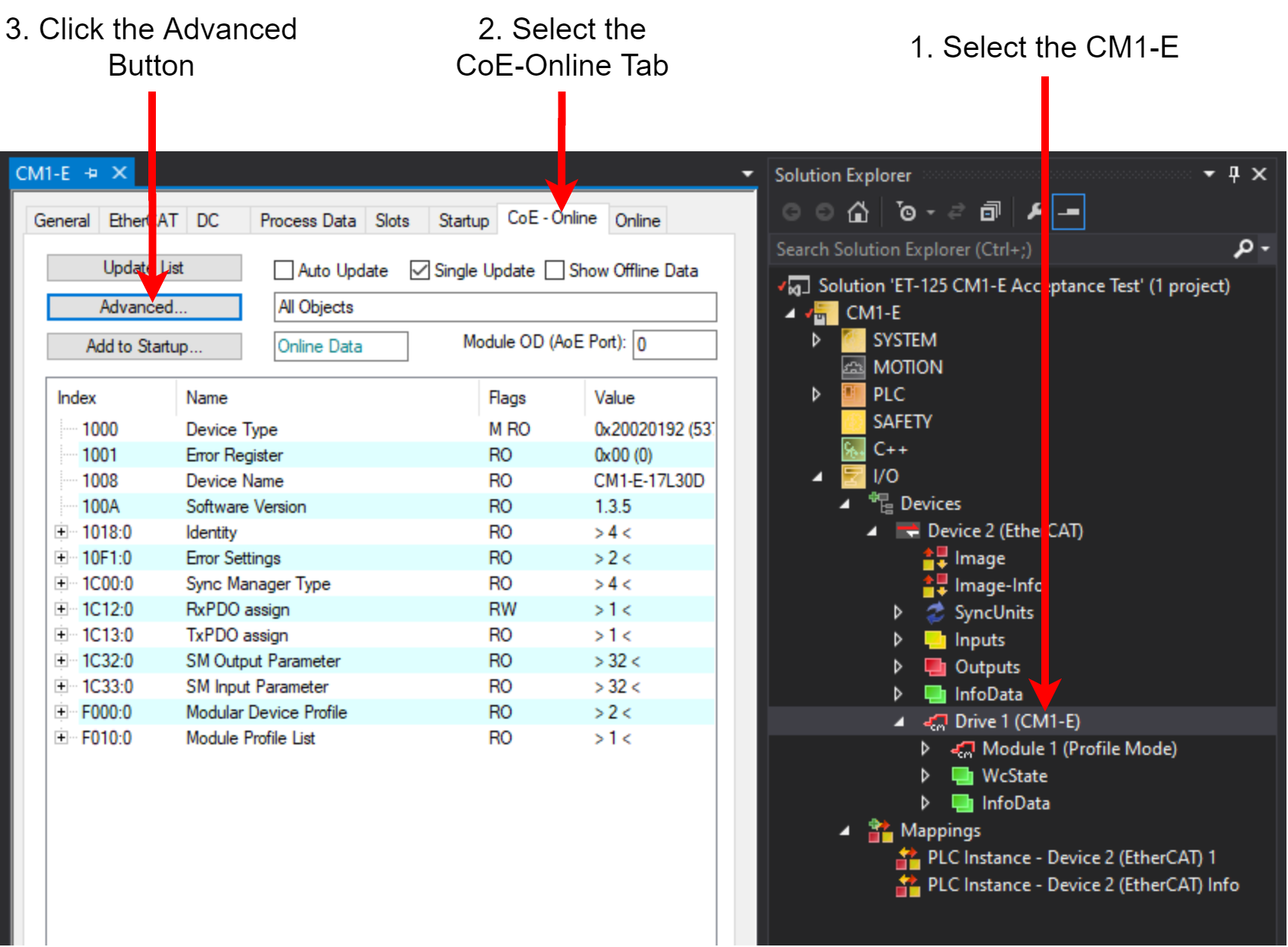
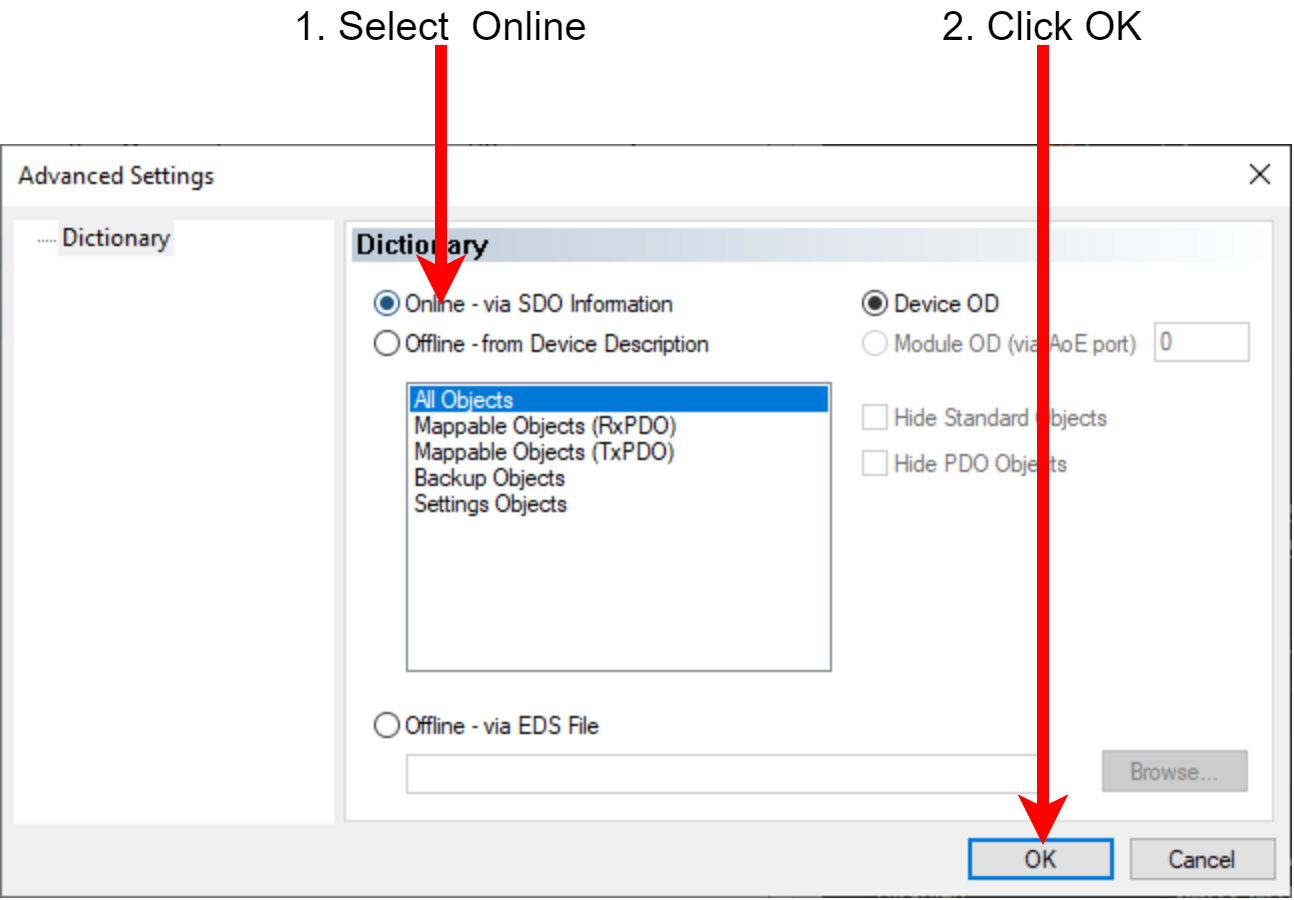
The following instructions show how to read/write the objects in TwinCAT3 through the online object dictionary. It assumes a CM1-E drive has already been added.
The full object dictionary is now available. The K and H parameters are shown below in red. Expand the list to see all the parameters.